
Professor Yang Gao FIET FRAeS
- Professor of Robotics
- Director of Centre for Robotics Research
- Editor-in-Chief of Wiley's Journal of Field Robotics
- Mentor of United Nations Space4Women 2023
Biography
Awards & Leadership
Research Expertise
a. perception & visual GNC
b. reconfigurable autonomy
c. bio-inspired mechanism
News & Media
Biography
Professor Yang Gao is the Professor of Robotics and heads the Centre for Robotics Research (CORE) at KCL from August 2023. Before joining KCL, she spent 19 years at University of Surrey UK where she founded and led the multi-award winning STAR LAB (Space Technology for Autonomous & Robotic systems Laboratory) and the start-up business Ai4SPACE Ltd. Prof Gao specializes in robotic sensing, perception, visual GNC and biomimetic mechanisms for space and other industry applications for extreme environments. She brings over 20 years of research experience in developing robotics and autonomous systems, in which she has been the Principal Investigator of inter/nationally teamed projects (net worth >£10m) funded by UK Research Innovation (UKRI), Royal Academy of Engineering, European Commission, European Space Agency (ESA), UK Space Agency (UKSA), as well as industries. Prof Gao is actively involved in design and development of real-world space missions including ESA ExoMars, Proba3 and VMMO (lunar ice mapper), UK's CLEAR, MoonLITE and Moonraker, and CNSA Chang'E3. Her work has also been applied to several non-space sectors including nuclear, oil/gas and agriculture through technology transfer and spin-offs.

 Prior to relocating to the UK from Singapore in 2004, Prof Gao was an awardee of the prestigious Singapore Millennium Foundation (SMF) Postdoctoral Fellowship and worked on intelligent and autonomous vehicles. She gained the B.Eng. (First Class Honors) degree and Ph.D. degree from the Nanyang Technological University (NTU), Singapore in 2000 and 2003 respectively.
Prior to relocating to the UK from Singapore in 2004, Prof Gao was an awardee of the prestigious Singapore Millennium Foundation (SMF) Postdoctoral Fellowship and worked on intelligent and autonomous vehicles. She gained the B.Eng. (First Class Honors) degree and Ph.D. degree from the Nanyang Technological University (NTU), Singapore in 2000 and 2003 respectively.
Prof Gao has edited and co-authored 4 books, including 2 textbooks by Wiley-VCH and IET, 1 research book by McGraw-Hill, and 1 proceeding book by Springer. She also co-authored about 170 scientific papers in internationally refereed books, journals and conference proceedings.
Back to top. Awards & Leadership
Prof Gao is the elected Fellow of Institute of Engineering and Technology (IET) and Royal Aeronautical Society (RAeS). She had been named by the Times Higher Education as one of ten young leading academics in the UK who are making a very significant contribution to their disciplines in 2008, and also been awarded the Mulan Award for Contributions to Science, Technology and Engineering in 2019. Research work under her leadership and supervision has received many international recognition, including International Astronautical Federation (IAF) 3AF Edmond Brun Silver Medal in 2013, COSPAR Outstanding Paper Award in 2016, UKSEDS Lunar Rover Competition First Prize in 2017, joint Winner of ESA SysNova Challenge on Lunar CubeSat Exploration in 2018, IEEE/ASME-AIM Best Paper Award Finalist in 2019, Top 3 place worldwide in ESA/Stanford Pose Estimation Challenge in 2019, First Prize of Wiley Poster Award at IEEE-ICRA Space Workshop in 2020, and First Prize of 14th Sino-UK Entrepreneurship Competition 2022, etc.
Prof Gao is the Editor-in-Chief of Wiley Journal of Field Robotics, the Section Editor, Associate Editor or Guest Editor of other international journals such as Springer's Current Robotics Reports, Frontiers' Robotics and AI, IEEE-CIM, and IEEE-AESM, and the Chair/Co-Chair/Member of technical committees such as IMechE Engage in Space Committee, IEEE-CIS Task Force and IEEE-RAS Technical Committee on Space Robotics.
Prof Gao serves major funding review panels or committees for UKRI Future Leadership Fellowship, European Science Foundation, and Royal Society International Newton Fellowship, etc. She is also the Mentor for the Mulan Foundation as well as the United Nations Office for Outer Space Affairs (UNOOSA) Space4Women program.
Prof Gao was the Conference General Chair of TAROS-2017 (the longest running UK-hosted international conference on AI robotics), the Conference Co-Chair of Light Conference 2018, the Conference Publicity Co-Chair of IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM-2019), and the Invited Speaker or Session Chair of scientific conferences and seminars (such as ESA AI-STAR, IEEE-UK/Ireland RAS Prestigious Lecture, IEEE ICRA-Space Workshop, IEEE-CDC, iSAIRAS, UK Space Conference, World Congress of Robotics, IET Seminars, UK-RAS International Robotics Showcase, EMSTA Prestige Seminar, UK Astrobiology and Planetary Exploration Series, RiTA, etc).
Prof Gao had been Associate Dean (International) of the Faculty of Engineering and Physical Sciences at University of Surrey in 2016-2021, leading international agenda and strategic development for the faculty while heading the faculty international committee and serving the university global engagement committee.
Back to top. Research Expertise
a) Sensing, Perception & Visual GNC
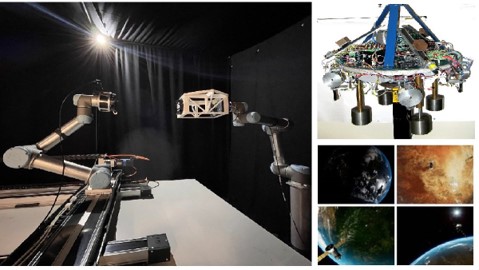 This research leads to low-computation, high-accuracy 3D mapping and perception for future spacecraft hence autonomous GNC in next-generation missions, ranging from formation flying, on-orbit servicing and manufacturing, to planetary exploration and in-situ resource utilization. Real-time testing and validation have been carried out using realistic simulators, lab-based testbeds or field trials, see demo videos at YouTube Playlists for orbital applications and planetary applications .
This research leads to low-computation, high-accuracy 3D mapping and perception for future spacecraft hence autonomous GNC in next-generation missions, ranging from formation flying, on-orbit servicing and manufacturing, to planetary exploration and in-situ resource utilization. Real-time testing and validation have been carried out using realistic simulators, lab-based testbeds or field trials, see demo videos at YouTube Playlists for orbital applications and planetary applications .
Major funded projects and contributions to real-world space missions include:
ESA ExoMars mission’s PanCam payload and Phase A study; ESA Proba3 mission’s FLLS payload; UKSA funded CREST-1, NSTP2, and CREST-3 projects; Airbus funded OOA project; CNSA Chang’E3 mission’s PanCam data analytics; UKRI/UKSA funded Future AI & Robotics for Space (FAIR-SPACE) project; UKSA funded space debris removal mission CLEAR Phase B.
Major journal publications:
- Montanaro, U, Martini, S, Hao, Z, Gao, Y, Sorniotti, A. Multi-input enhanced model reference adaptive control strategies and their application to space robotic manipulators. Int J Robust Nonlinear Control. 2023; 33( 10): 5246- 5272. doi: 10.1002/rnc.6639
- Thomas Barbier, Yang Gao, Relative visual navigation around an unknown and uncooperative spacecraft, Acta Astronautica, Volume 206, 2023, Pages 144-155, https://doi.org/10.1016/j.actaastro.2023.02.022.
- M. Visca, R. Powell, Y. Gao and S. Fallah, "Probabilistic Meta-Conv1D Driving Energy Prediction for Mobile Robots in Unstructured Terrains," in IEEE Access, 2022, doi: 10.1109/ACCESS.2022.3209259.
- Marco Visca, Roger Powell, Yang Gao, Saber Fallah, Deep Meta-Learning Energy-Aware Path Planner for Unmanned Ground Vehicles in Unknown Terrains, IEEE Access, 2022, 10.1109/ACCESS.2022.3155161,
- L. Dai, J. Liu, Z. Ju and Y. Gao, "Attention Mechanism based Real Time Gaze Tracking in Natural Scenes with Residual Blocks," IEEE Transactions on Cognitive and Developmental Systems, Vol 2 (2), 696-707, 2022, doi: 10.1109/TCDS.2021.3064280.
- Mavrakis Nikos, Hao Zhou, Gao Yang, On-Orbit Robotic Grasping of a Spent Rocket Stage: Grasp Stability Analysis and Experimental Results, Frontiers in Robotics and AI, 2021, doi:10.3389/frobt.2021.652681.
- Zhou Hao, Ashith Shyam Babu, Arunkumar Rathinam, Yang Gao, Intelligent spacecraft visual GNC architecture with the state-of-the-art AI components for on-orbit manipulation, Frontiers in Robotics and AI, section Space Robotics, 2021, DOI: 10.3389/frobt.2021.639327.
- Ashith Shyam Babu, Zhou Hao, Arunkumar Rathinam, Shilp Dixit, Umberto Montanaro, Yang Gao, Gerhard Neumann, Saber Fallah, Autonomous Robots for Space: Trajectory Learning and Adaptation Using Imitation, Frontiers in Robotics and AI, section Space Robotics, 2021, DOI: 10.3389/frobt.2021.638849.
- L. Dai, J. Liu, Z. Ju and Y. Gao, "Iris Centre Localization Using Energy Map with Image Inpaint Technology and Post-Processing Correction," in IEEE Access, vol. 8, pp. 16965-16978, 2020. DOI: 10.1109/ACCESS.2020.2966722.
- Robert Skilton, Yang Gao, Combining object detection with generative adversarial networks for in-component anomaly detection, Fusion Engineering and Design, Volume 159, 2020, doi.org/10.1016/j.fusengdes.2020.111736.
- Miranda Bradshaw, Yang Gao, Kevin Homewood, “Interpolation methods for tracking spacecraft in ultra-tight formation”, Journal of Astronomical Telescopes, Instruments, and Systems, 5(2), 028003, 2019, doi: 10.1117/1.JATIS.5.2.028003.
- Pedro F. Proença, Yang Gao, "Probabilistic RGB-D odometry based on points, lines and planes under depth uncertainty”, Robotics and Autonomous Systems, 10 March 2018, doi.org/10.1016/j.robot.2018.02.018.
- Juntian Si, Yang Gao, Abadi Chanik, Feedback Slew Algorithms for Prolate Spinners Using Single-Thruster, Acta Astronautica, Vol 144, pp. 39-51, March 2018, https://doi.org/10.1016/j.actaastro.2017.11.044.
- Yang Gao, Steven Chien, Review on space robotics: Toward top-level science through space exploration. Science Robotics, 2, eaan5074 (2017). http://robotics.sciencemag.org/content/2/7/eaan5074.full
- Affan Shaukat, Yang Gao, Jeffrey A. Kuo, Bob A. Bowen and Paul E. Mort, "Visual Classification of Waste Material for Nuclear Decommissioning," Robotics and Autonomous Systems, Volume 75, Part B, Pages 365-378, 2016, doi: 10.1016/j.robot.2015.09.005.
- Abadi Chanik, Yang Gao, and Juntian Si, Modular Testbed for Spinning Spacecraft, Journal of Spacecraft and Rockets 2017 54:1, 90-100
- Conrad Spiteri, Affan Shaukat and Yang Gao "Structure Augmented Monocular Saliency for Planetary Rovers," Robotics and Autonomous Systems, Vol. 88, 1-10, 2017, doi:10.1016/j.robot.2016.11.013.
- Affan Shaukat, Peter Blacker, Conrad Spiteri, and Yang Gao "Towards Camera-LIDAR Fusion-Based Terrain Modelling for Planetary Surfaces: Review and Analysis," Sensors, 16(11), 2016, doi:10.3390/s16111952.
- Yang Gao, Conrad Spiteri, Chun-Lai Li and Yong-Chun Zheng, “Lunar Soil Strength Estimation based on Chang’E3 Images”, Advances in Space Research, Volume 58, Issue 9, p. 1893-1899, 2016, doi: 10.1016/j.asr.2016.07.017.
- Abhinav Bajpai, Affan Shaukat, Guy Burroughes, Yang Gao, Planetary Monocular Simultaneous Localization and Mapping (PM-SLAM), Journal of Field Robotics, Volume 33, Issue 2, pages 229–242, 2015, DOI: 10.1002/rob.21608.
- Conrad Spiteri, Yang Gao, Said Al-Milli, and Aridane Sarrionandia de León, Real-time Visual Sinkage Detection for Planetary Rovers, Robotics and Autonomous Systems, Vol 72, pp. 307–317, 2015.
- Yang Gao, Conrad Spiteri, Minh-Tri Pham, and Said Al-Milli, A Survey on Recent Object Detection Techniques Useful for Monocular Vision-based Planetary Terrain Classification, Robotics and Autonomous Systems, Vol. 62, Issue 2, pp. 151-167, 2013, 10.1016/j.robot.2013.11.003.
- Peter Yuen, Yang Gao, Andrew Griffiths, Andrew Coates, Jan-Peter Muller, Alan Smith, Dave Walton, Craig Leff, Barry Hancock and Dongjoe Shin, ExoMars PanCam: Autonomy and Computational Intelligence, IEEE Computational Intelligence Magazine, Volume 8, Issue 4, pp. 52-61, Nov. 2013.
- Robin Raus, Yang Gao, Yunhua Wu, Mark Watt, Analysis of state-of-the-art single-thruster attitude control techniques for spinning penetrator, Acta Astronautica, Volume 76, pp. 60-78, 2012.
- Yunhua Wu, Yang Gao, Robin Raus, Mark Watt, “A Trade-off Study of Single Thruster Attitude Control Algorithms for Prolate Spinning Spacecraft”, AIAA Journal of Guidance, Control, and Dynamics, vol. 35, no.4, pp. 1143-1157, 2012.
- Yang Gao, Renato Samperio, Karin Shala and Ye Cheng, “Modular Design for Planetary Rover Autonomous Navigation Software using ROS”, Acta Futura, Issue 5, pp. 9-16, 2012.
- Dario L. Sancho-Pradel and Yang Gao, “A Survey on Terrain Assessment Techniques for Autonomous Operation of Planetary Robots”, Journal of British Interplanetary Society, Vol. 63, No. 5/6, pp. 206-217, May/June 2010.
Back to top. b) Reconfigurable Autonomy
 The research leads to technologies for domain-independent reconfigurable software architectures for future autonomous systems. It builds on autonomous software agents with abilities to learn and reason. Such technologies are particularly useful to address issues like decision-making, task planning and scheduling, hardware/software reconfiguration and self-verification for growingly complex systems and to support future manned and unmanned space missions, as well as other industrial domains such as energy and agriculture.
Major UKRI-EPSRC funded research projects include: FAIR-SPACE RAI hub grant; Industrial sixth Sense grant; Autonomous and Intelligent Systems Programme; Impact Acceleration Account; Strategic Collaboration Award; Capital Equipment Grant.
The research leads to technologies for domain-independent reconfigurable software architectures for future autonomous systems. It builds on autonomous software agents with abilities to learn and reason. Such technologies are particularly useful to address issues like decision-making, task planning and scheduling, hardware/software reconfiguration and self-verification for growingly complex systems and to support future manned and unmanned space missions, as well as other industrial domains such as energy and agriculture.
Major UKRI-EPSRC funded research projects include: FAIR-SPACE RAI hub grant; Industrial sixth Sense grant; Autonomous and Intelligent Systems Programme; Impact Acceleration Account; Strategic Collaboration Award; Capital Equipment Grant.
Major journal publications:
- Farrell Marie, Mavrakis Nikos, Ferrando Angelo, Dixon Clare, Gao Yang, Formal Modelling and Runtime Verification of Autonomous Grasping for Active Debris Removal, Frontiers in Robotics and AI, 2022, DOI=10.3389/frobt.2021.639282.
- Aitken, Jonathan, Sandor Veres, Affan Shaukat, Yang Gao, Elisa Cucco, Louise Dennis, Michael Fisher, Jeff Kuo, Thomas Robinson, and Paul Mort. "Autonomous nuclear waste management." IEEE Intelligent Systems, 2018, Vol. 33, Issue 6, 10.1109/MIS.2018.111144814.
- Angadh Nanjangud, Peter C. Blacker, Saptarshi Bandyopadhyay, and Yang Gao, "Robotics and AI enabled On-Orbit Operations with Future Generation of Small Satellites" Proceedings of the IEEE, 106 (3), pp. 429-439, 2018, doi.org/10.1109/JPROC.2018.2794829.
- Guy Burroughes and Yang Gao, "Ontology-Based Self-Reconfiguring Guidance, Navigation, and Control for Planetary Rovers". AIAA Journal of Aerospace Information Systems, Vol. 13, No. 8, pp. 316-328, 2016, doi: 10.2514/1.I010378.
- Dennis LA, Fisher M, Aitken JM, Veres SM, Gao Y, Shaukat A, Burroughes G., Reconfigurable Autonomy, KI - Künstliche Intelligenz, Springer, 28 (3), pp. 199-207, 2014.
- Juan M. Delfa Victoria, Simone Fratini, Nicola Policella, Oskar von Stryk, Yang Gao and Alessandro Donati, Planning Mars Rovers with Hierarchical Timeline Networks, Acta Futura, Issue 9, 21-29, 2014.
- Yang Gao, Nicola Policella, and Frank Kirchner, Computational Intelligence for Space Systems and Operations, IEEE Computational Intelligence Magazine, Volume 8, Issue 4, pp. 9-11, Nov. 2013.
- Yang Gao, Renato Samperio, Karin Shala and Ye Cheng, “Modular Design for Planetary Rover Autonomous Navigation Software using ROS”, Acta Futura, Issue 5, pp. 9-16, 2012.
- Yifan Luo, Jinguo Liu, Yang Gao and Z Lu, Smartphone-Controlled Robot Snake for Urban Search and Rescue, Lecture Notes in Computer Science, 8917, pp. 352–363, 2014.
- Angadh Nanjangud, Peter C. Blacker, Saptarshi Bandyopadhyay, and Yang Gao, "Robotics and AI enabled On-Orbit Operations with Future Generation of Small Satellites" Proceedings of the IEEE, 106 (3), pp. 429-439, 2018, 10.1109/JPROC.2018.2794829.
- C. Saunders, D. Lobbb, M. Sweeting, Y. Gao, Building Large Telescopes In Orbit Using Small Satellites, Acta Astronautica, 141, 183-195, 2017. https://doi.org/10.1016/j.actaastro.2017.09.022.
Back to top. c) Bio-inspired Mechanism
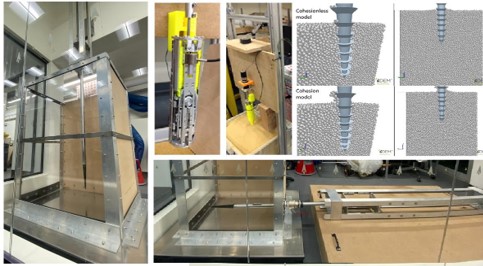 The research leads to technologies for energy-optimised locomotion mechanisms and control. We pioneer the R&D for bio-inspired Dual Reciprocating Drilling (DRD) technology - also known as the ‘wasp drill’ - allowing deep drilling with flexible deployment mechanism in low-gravity environments, and low-mass sampling tool suitable for small space vehicles. (COSPAR Outstanding Paper Award 2016; Finalist of IEEE/ASME's AIM Best Paper Award 2019; Exhibition at National Science Museum 'Antenna' gallery). We also pionner or invented the innovative surface Mobile Active Rover Chassis for Enhanced Locomotion (MARCEL), capable of negotiating with loose soil and rugged terrains using minimal actuation. Real-time testing and validation have been carried out using lab-based testbeds or field trials, see demo videos at YouTube Playlists for planetary subsurface applications and planetary surface applications .
The research leads to technologies for energy-optimised locomotion mechanisms and control. We pioneer the R&D for bio-inspired Dual Reciprocating Drilling (DRD) technology - also known as the ‘wasp drill’ - allowing deep drilling with flexible deployment mechanism in low-gravity environments, and low-mass sampling tool suitable for small space vehicles. (COSPAR Outstanding Paper Award 2016; Finalist of IEEE/ASME's AIM Best Paper Award 2019; Exhibition at National Science Museum 'Antenna' gallery). We also pionner or invented the innovative surface Mobile Active Rover Chassis for Enhanced Locomotion (MARCEL), capable of negotiating with loose soil and rugged terrains using minimal actuation. Real-time testing and validation have been carried out using lab-based testbeds or field trials, see demo videos at YouTube Playlists for planetary subsurface applications and planetary surface applications .
Major funded projects and contributions to real-world space missions include:
Kent Line Rental Scheme on 1m Lateral Cuts for Utility Sector; ESA ExoMars mission’s sampling payload testing; ESA Lunar Polar Sample Return (LPSR) mission’s L-GRASP payload testing; CNSA’s Chang’E3 mission terrain image analytics; ESA’s ACT grant on Bionics and Space Systems; NPI/OHB grant on innovative deep drilling; RAEng project on low-cost sampling; UKRI/UKSA funded FAIR-SPACE project.
Major journal publications:
- Arthur Bouton and Yang Gao, Active Rover Chassis Dealing with Obstacles Using an Interpretable Control Derived by Reinforcement Learning, Journal of Field Robotics, 40, 1504–1524, 2023. DOI: 10.1002/rob.22188.
- Craig Pitcher, Xavier Pang, Mohamed Alkalla, Yang Gao, Development of a multi-sample acquisition technique for efficient planetary subsurface exploration, Acta Astronautica, Volume 198, Pages 309-319, 2022, https://doi.org/10.1016/j.actaastro.2022.06.008.
- Mohamed Alkalla, Xavier Pang, Craig Pitcher, Yang Gao, DROD: A hybrid biomimetic undulatory and reciprocatory drill: Quantitative analysis and numerical study, Acta Astronautica, 2021, https://doi.org/10.1016/j.actaastro.2021.02.007.
- Craig Pitcher, Mohamed Alkalla, Xavier Pang, Yang Gao, Development of the Third Generation of the Dual-Reciprocating Drill, 5(3), Biomimetics, 2020. doi.org/10.3390/biomimetics5030038.
- Craig Pitcher and Yang Gao, Physical Properties of Icy Materials, in Outer Solar System: Prospective Energy and Material Resources, Springer-Verlag, pp. 1-940, ISBN: 978-3-319-73844-4, 2018, doi:10.1007/978-3-319-73845-1.
- David Firstbrook, KevinWorrall, Ryan Timoney, Francesc Suñol, Yang Gao and Patrick Harkness, An experimental study of ultrasonic vibration and the penetration of granular material, Royal Society Proceedings A: Mathematical, Physical and Engineering Sciences, 473(2198), 2017, doi: 10.6084/m9.figshare.c.3683191.
- Craig Pitcher and Yang Gao, First implementation of burrowing motions in dual-reciprocating drilling using an integrated actuation mechanism, Advances in Space Research, Volume 59, Issue 5, p. 1368-1380, 2017, doi:10.1016/j.asr.2016.12.017
- Norbert Kömle, Craig Pitcher, Yang Gao and Lutz Richter. Study of the Formation of Duricrusts on the Martian Surface and Their Effect on Sampling Equipment. ICARUS, Volume 281, p. 220-227, 2017, doi: 10.1016/j.icarus.2016.08.019.
- Craig Pitcher, Norbert Kömle, Otto Leibniz, Odalys Morales-Calderon, Yang Gao and Lutz Richter. "Investigation of the properties of icy lunar polar regolith simulants." Advances in Space Research, Volume 57, Issue 5, Pages 1197–1208, 2016, doi:10.1016/j.asr.2015.12.030.
- Craig Pitcher and Yang Gao, Analysis of drill head designs for dual-reciprocating drilling techniques in planetary regolith, Advances in Space Research, Volume 56, Issue 8, pp. 1765–1776, 2015. COSPAR Outstanding Paper Award
- Liu J, Wang Y, Ma S, Luo Y, Gao Y, Comments on "sidewinding with minimal slip: snake and robot ascent of sandy slopes", Robot, 37(2), pp. 254-256, 2015.
- Thibault Gouache, Yang Gao, Pierre Coste, Yves Gourinat, First experimental investigation of dual reciprocating drilling in planetary regolith: proposition of penetration mechanics, Planetary and Space Science, Volume 59, Issue 13, pp. 1529-1541, October 2011.
- Thibault P. Gouache, Christopher Brunskill, Gregory P. Scott, Yang Gao, Pierre Coste, Yves Gourinat, Regolith simulant preparation methods for hardware testing, Planetary and Space Science, Volume 58, Issues 14-15, pp. 1977-1984, 2010.
- Y. Gao, M.N.Sweeting, S. Eckersley, J.F.V. Vincent, A “micro” concept for a planetary penetrator & drill package, in Penetrometry in the Solar System II, Gunter Kargl, Norbert I. Komle, Andrew J. Ball, Ralph D. Lorenz (Ed.), Vienna: Austrian Academy of Sciences Press, pp. 83-92, 2009, ISBN 978-3-7001-6531-6.
- Thibault Gouache, Yang Gao, Yves Gourinat and, Pierre Coste, Wood Wasp Inspired Space and Earth Drill, in Biomimetics, Learning from Nature, pp.467-486, March 2009, ISBN 978-953-307-025-4.
- N.I. Kömle, E. Kaufmann, G. Kargl, Y. Gao and X. Rui, “Development of thermal sensors and drilling systems for lunar and planetary regoliths”, Advances in Space Research, Volume 42, Issue 2, pp. 363-368, July 2008.
- N.I. Komle, E. S. Hutter, G. Kargl, H. Ju, Y. Gao, J. Grygorczuk, Development of Thermal, Sensors and Drilling Systems, For Application On Lunar Lander Missions, Earth, Moon and Planets, 103, pp. 119-141, 2008.
Back to top. News & Media
Back to top.